
巡天相机
来源:CSST科学工作联合中心
多色成像与无缝光谱巡天相机(Multi-band Imaging and Slitless Spectroscopy Survey Camera,SC,简称巡天相机)对主光学系统的光学影像进行分波段滤光、色散和采集,然后将图像和辅助数据通过设施与平台下行,实现多色成像与无缝光谱巡天的功能。该相机由巡天主焦面与天体定标组件、短波红外组件、滤光片组件、无缝光谱组件、快门组件、主体结构、热控与制冷组件、巡天主焦面与天体定标焦面电子学、主控电控箱、定标光源等构成。主光机的波前传感器和精细导星仪也安装在巡天相机上。巡天相机主焦面主要性能指标及相机本体结构分解分别见表1和图 1。
表1 巡天相机主焦面主要性能指标
|
项目类型 |
指标要求或预计结果 | |
|
主焦面探测器 |
规格 |
30片9.2k×9.2k CCD,10μm像元 |
|
读出噪声 |
≤ 5 e-/pix @ 150kHz(含电路) | |
|
暗电流 |
≤ 0.02 e-/(pix·s) @ -85℃ | |
|
满阱容量 |
≥ 70 ke-,平均≥ 90 ke- | |
|
成像波段与 |
NUV (252-321nm, 4×150s) |
i (692-842nm, 2×150s) |
|
u (321-401nm, 2×150s) |
z (842-1000nm, 2×150s) | |
|
g (401-547nm, 2×150s) |
y(1) (927-1100nm, 4×150s) | |
|
r (547-692nm, 2×150s) |
g≮26;NUV、u、r、i、z等权平均≮25.5 | |
|
无缝光谱波段与宽场极限星等(2) |
GU (255-410nm, 4×150s) |
GI (620-1000nm, 4×150s) |
|
GV (400-640nm, 4×150s) |
GU≮22;GV≮23;GI≮23 | |
|
光谱分辨率 |
GU、GV、GI |
平均 ≥ 200 |
(1) y波段红端由探测器截止。
(2) 极限星等为点源5σ AB星等;400平方度深场要求比17500平方度宽场深1个星等以上。
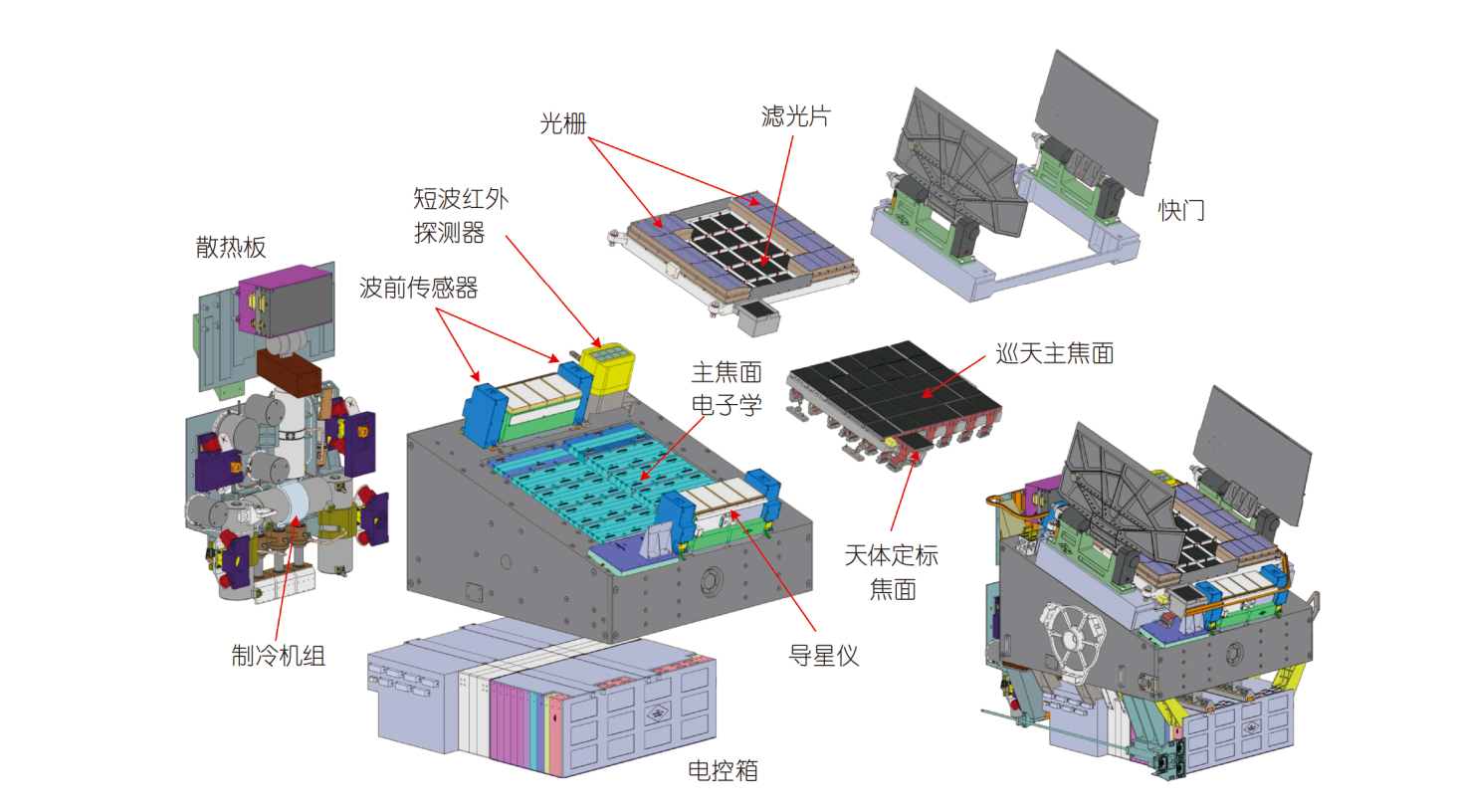
图1 巡天相机结构分解图

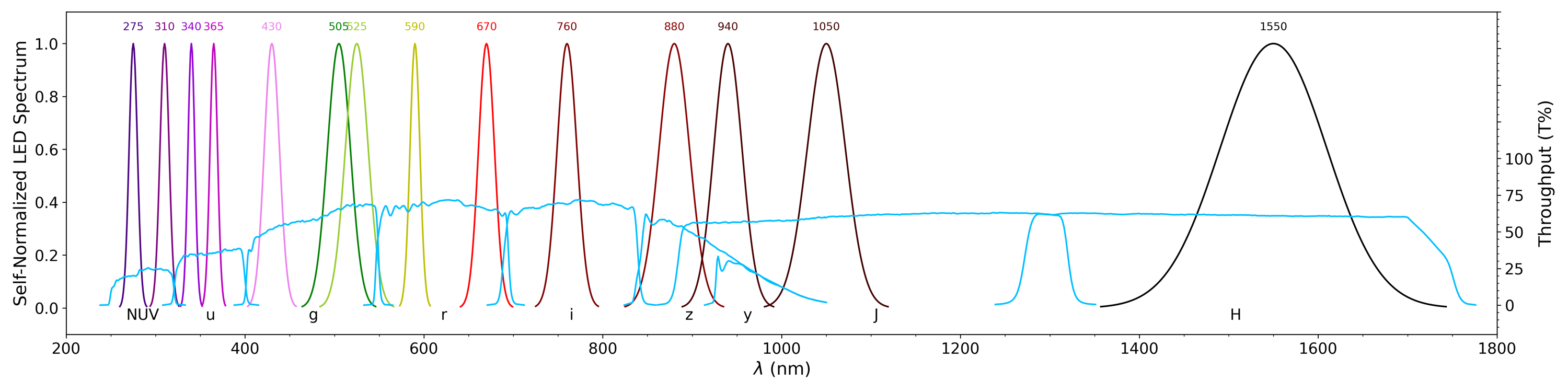
图2 左:巡天相机主焦面布局;右:成像波段滤光片透过率曲线
中心区域排布成像波段,上下“L”形区域排布无缝光谱波段。主焦面CCD与滤光片和光栅固定安装,可见光红端选用e2v CCD290-99深耗尽器件,近紫外与可见光蓝端选用预计按波段优化量子效率的CCD290-99普通硅器件与国产CCD混装。从近紫外到短波红外的各成像波段滤光片实测的透过率曲线见图 2 右图。
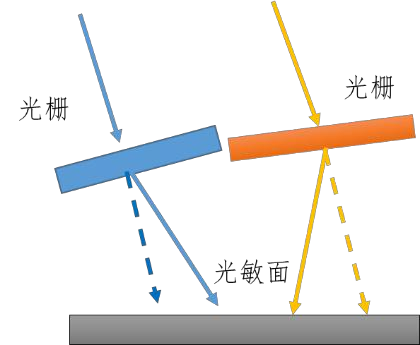
无缝光谱观测采用透射式闪耀光栅在成像光路里直接色散实现。如图3 所示,每片CCD对应两片光栅,每片光栅的工作级次均偏向对面光栅的方向,从而保证CCD对应视场内所有天体的光谱均落在该CCD光敏面上。为了缓解天体光谱重叠的问题,图2左图中上下两组光栅的色散方向作了相对旋转,受结构限制旋转角度仅2°。在无缝光谱可探测的大部分星系的有效半径小于0.3″且面密度每平方角分仅若干个的情况下,2°的旋转可以有效地发挥作用。
定标光源采用单色LED为焦面提供均匀照明,以改正像元小尺度响应不均匀性,标定快门效应,监测焦面性能变化,并可提供补光功能,以缓解运行后期CCD电荷转移效率下降的影响。如图4 所示,在各观测波段内均有至少 1 个对应波长的 LED。
巡天相机主体结构承载其他组件,采用碳纤维复合材料薄壁箱体结构的设计,保证相机整体的结构刚度和稳定性。快门由步进电机直驱,开合时间各1.5s,叶片转动曲线随科学辅助数据下行,快门运动产生的扰动需精密稳像系统进行补偿。主焦面与天体定标焦面由两台脉管制冷机维持188K(-85℃)的工作温度。焦面CCD视频信号采用数字相关双采样技术,转换成低噪声图像数据。短波红外焦面由一台脉管制冷机维持80K的工作温度,所用的碲镉汞焦平面器件具有非破坏性读出的功能。相机各组件产生的热量由槽道热管收集至散热板,通过主光机的蒸发器和环路热管交换至外层辐冷板,最终辐射到冷黑空间。
